“海事二号”搜救水下机器人
一、项目简介
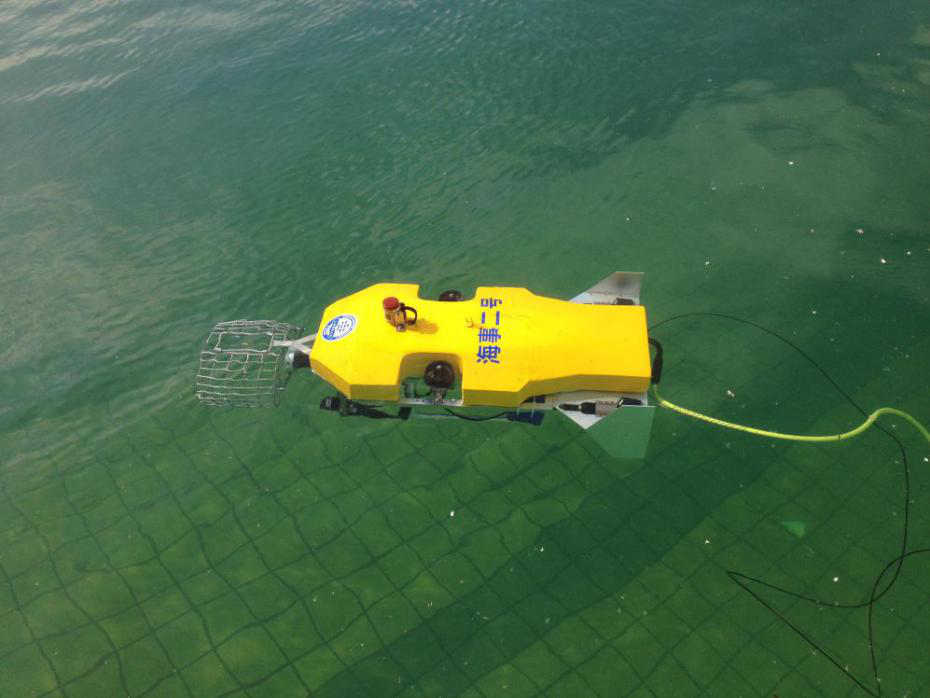
“海事二号”搜救水下机器人是一种遥控水下机器人(ROV)搜救系统,是上海海事大学085工程建设的“物流安全与海事搜救创新平台”的重要组成部分,这一系统研发工作是由上海海事大学水下机器人与智能系统实验室的研究生为主进行开发的。
遥控水下机器人(ROV)是一种可以在复杂海洋环境中工作的远程遥控作业平台,能够开展海洋资源探测与水下搜救等任务。通过开发ROV系统,能让师生掌握ROV相关设计技术,并能了解ROV系统目前存在的主要技术问题。同时,基于所开发的ROV系统平台可以开展水下机器人控制算法、水下目标探测与识别和水下定位等关键技术研究。
二、技术创新点
1. 技术参数:重量60kg,最大深度150米,4台300W推进器,最大航速4节,可搭载5kg载荷;
2. 采用脐带缆进行动力传输和通信,可进行远程程序下载;
3. 具有机械抓斗,可对非规则物体进行抓取操作。配有前视声纳,能有效避障;
4. 通过左右摄像机对水下目标进行三维重建,可完成更精准的水下现场作业,提高作业的精度和效率。
三、专利发明
1.邓志刚,朱大奇,孙兵,颜明重,一种具有双目视觉的搜救水下机器人装置,发明专利(201510714887.5);
2.邓志刚,朱大奇,孙兵,袁芳,褚振忠,李欣,一种遥控水下机器人的抓斗装置,发明专利(201610017238.4)。
四、应用领域
该ROV在经济性和灵活性等方面要优于传统 ROV,由于“海事二号”ROV具备搜索和作业能力,因此可用内陆湖泊或作浅海海底区域渔业、打捞、水下搜救,以及水下勘探、大坝检测、江河湖泊的水质检测等,可与其他种类潜水器配合完成海洋调查和考察任务。