一、项目简介
本项目基于ROS系统实现对无人艇的控制,深入解析水上交通图像成像规律,以船舶图像航迹的时序信息为约束条件建立船舶图像航迹跟踪方法,构建船舶成像尺度变化、船舶成像视角变化等典型航迹跟踪,调整自适应的船舶图像航迹稳健跟踪框架,并辨识船舶图像航迹数据时空连续性规律,建立船舶图像航迹异常跟踪数据的检测与筛选模型。搭建链接船舶图像航迹跟踪异常数据与船舶图像航迹稳健跟踪模型的反馈-驱动关联机制,建立船舶图像航迹跟踪数据提取、分析和优化的闭环控制策略,建立通航态势智能感知的船舶高精度航迹数据提取与分析机制。
二、项目图片

图1 搭载多源传感器的无人船原型
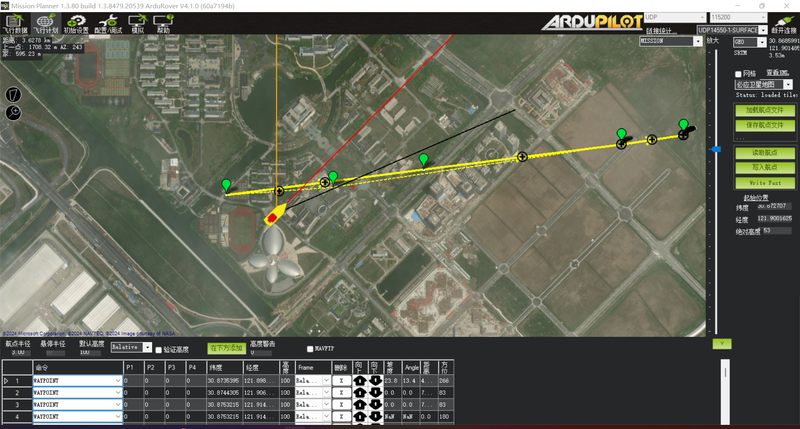
图2 通航态势智能感知系统

图3 船舶行为分析结果
三、获奖情况
1.相关论文“High-Resolution Vehicle Trajectory Extraction and Denoising From Aerial Videos”入选2022年交通运输重大科技成果库;
2.国际交通科技年会CICTP 2020-21最佳区域编辑;
3.第十三届全国交通运输领域青年学术会议优秀论文(10%)。
四、专利情况
1.Chen X, Wu H, Yang Y, et al. Ship image trajectory tracking and prediction method based on ship heading recognition: U.S. Patent Application 17/886,901[P]. 2024-1-11
2.Xinqiang CHEN, Yongsheng Yang, et al. VESSEL TYPE IDENTIFICATION METHOD USING COARSE-TO-FINE CASCADED CONVOLUTIONAL NEURAL NETWORK:CA 3084451,[P]. 2024-2-20
3.陈信强,吴昊,杨勇生等. 一种基于船艏向识别的船舶图像轨迹跟踪与预测方法:CN202210789127.0[P]. 2022-10-04.
五、应用领域
该项目旨在建立一种拥有自主航行能力的水上安全作业无人艇,可以有效地完成水面巡逻,科研数据采集等任务。该无人艇能够实时监测船舶周围的水深、水流、潮汐等情况,并结合船舶识别轨迹提取算法识别周围环境的船舶并提取轨迹并进行分析,从而自主决策最佳的航行路线和速度建议。其次,提供准确的环境信息,为水上资源开发、科研提供支持,促进海洋经济的发展和利用。
联系部门:技术转移中心
联系人:吴老师/王老师
电话:38283308/50193210
电子邮件:gswu@shmtu.edu.cn