本项目从技术选择、模型构建、系统实现、功能测试四个方面开展了物流分拣机器人数字孪生系统关键技术研究,提出了五层结构框架的物流分拣机器人数字孪生系统。基于模块化高内聚低耦合的理念进行开发,设计了总控、通信、控制、信息监控、设备基础信息五大模块开展数字孪生系统功能应用,并对各个模块进行测试,测试结果验证了该机器人数字孪生系统框架的可行性,能够使物理世界与信息世界的互通互联,实现了对于机器人的控制和三维可视化监控,进一步提升了工业机器人的智能化水平。
二、技术原理与创新点
(一)技术创新点
1.架构创新:提出五层结构框架,为系统稳定运行提供核心支撑。
2.开发理念先进:采用模块化高内聚低耦合开发模式,划分总控、通信等五大功能模块,提升系统灵活性与可维护性。
3.虚实深度融合:实现物理世界与信息世界互通互联,支持机器人控制与三维可视化监控,提升工业机器人智能化水平。
4.扩展性设计:预留信息面板与数据接口,适配后续不同实际应用场景,增强系统适配性与复用性。
(二)相关图片
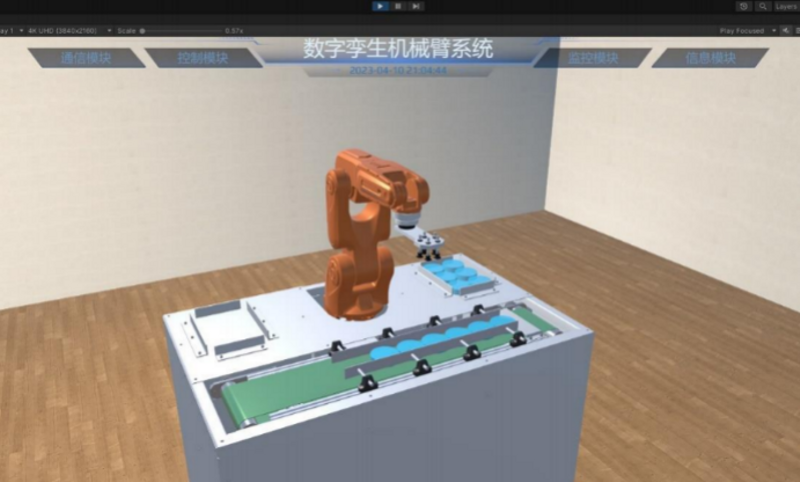
图1 数字孪生机器人系统
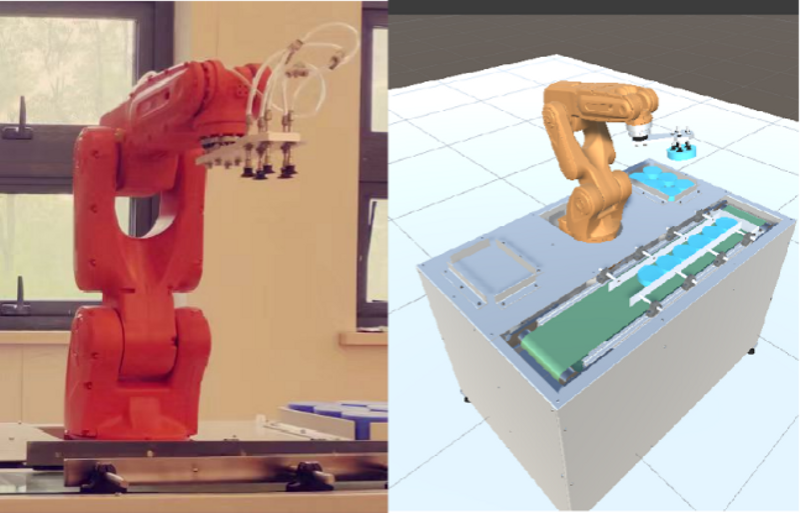
图2 物理实体与虚拟模型

图3 VR实现人机交互
三、技术优势与竞争力
(一)核心技术优势
1.架构可靠:创新提出五层结构框架,为系统稳定运行奠定基础。
2.设计高效:采用模块化高内聚低耦合理念,划分五大功能模块,提升系统灵活性与可维护性。
3.虚实联动:实现物理与信息世界互通,支持机器人控制及三维可视化监控,提升智能化水平。
4.扩展性强:预留信息面板与数据接口,适配后续多元应用场景,复用性高。
5.实用价值突出:可降低企业培训与时间成本,提升作业安全系数,弥补现有系统短板。
(二)核心竞争力
1.技术差异化:独特五层架构+模块化设计,区别于传统系统,解决实际应用痛点更精准。
2.落地性强:经功能测试验证可行性,无需复杂适配即可对接物流分拣场景,落地门槛低。
3.适配范围广:支持多视角观察与场景拓展,可服务不同规模物流企业及工业智能化装备升级需求。
4.成本与安全双重赋能:兼顾降本与安全核心诉求,契合企业智能化升级的实际需求,市场接受度高。
四、应用场景与市场前景
应用前景:适配物流行业(电商、快递、仓储等)分拣场景,通过虚实互联、三维可视化监控及多视角观察功能,满足机器人精准控制、作业状态实时监管需求。同时,降低企业培训与时间成本、提升作业安全系数,解决传统分拣系统智能化不足、运维效率低的痛点。依托预留的数据接口与信息面板,可延伸至智能制造、生产物流等工业智能化装备领域,适配各类自动化设备的虚拟管控需求,契合当下制造业与物流行业数字化、智能化升级的政策导向,应用场景持续拓宽。
产业化前景:市场需求刚性强,随着电商、快递行业规模扩大及制造业智能化转型加速,企业对高效、安全、低成本的分拣管控方案需求迫切,为产业化提供广阔空间。技术层面,模块化设计与高扩展性降低落地适配成本,适配不同规模企业需求,落地门槛低。产业化路径清晰,可通过“标准系统销售+定制化开发”模式对接物流企业、智能制造企业,后续可拓展至更多工业自动化场景,形成规模化效应。本成果降本增效、提升安全的核心价值契合企业实际诉求,市场接受度高,产业化潜力显著,有望成为物流与工业智能化升级的核心配套系统。
五、相关专利
1.一种基于数字孪生的机器人运动控制方法及装置:CN202510098761.3;
2.智能分拣系统数字孪生协同调度方法:CN202410321546.8;
3.模块化数字孪生设备监控系统:CN202310876532.9。